








تاریخچه ربات ها بسیار قدیمی تر از آن چیزی است که فکر می کنید. امروزه در اغلب فیلم ها، ربات ها را به عنوان جنبه منفی مدرنیته معرفی می کنند؛ اما این نظرات معمولاً ریشه در ترس دارند. نگاهی گذرا به تاریخچه رباتها نشان میدهد که آن ها چقدر برای توسعه زندگی انسانها ارزشمند و تأثیرگذار بودهاند. قرار است ربات ها زندگی انسان را آسانتر کنند و تاریخ نشان میدهد که همیشه در گذشته نیز چنین بوده است. برای این منظور، ما تاریخچه ربات ها را گردآوری کرده ایم و خواهید دید که اولین ربات در چه سالی ساخته شد و چیزی به عنوان شورش ربات ها جای نگرانی ندارد.

ربات چیست؟
ربات، ماشینی قابل برنامه ریزی است که امکان انجام مجموعه ای پیچیده از عملیات را به طور خودکار دارد. از آنجا که قابلیت انعطافپذیری و خستگیناپذیری ربات ها را انسان ها نمی توانند داشته باشند، به راحتی میتوان فهمید که چرا این ماشینها باعث میشوند افراد خاصی برای از دست دادن موقعیت شغلی خود ترس داشته باشند و ربات ها را رقیب خود قلمداد کنند و با آن ها مخالف باشند.
رباتها مدتهاست که کانون توجه صنعتگران و دانشمندان بودهاند و در دهههای اخیر بخشی از نیروی کار ما شدند. رباتیک نقطه تلاقی علم، مهندسی و فناوری است که ماشینهایی به نام ربات تولید میکند که جایگزین اعمال انسان میشوند. اگر به این علم علاقه دارید و دوست دارید در این زمینه خبره شوید فرادرس آموزشهای فوق العاده ای در این زمینه ارائه می دهد که می توانید به راحتی و به صورت آنلاین از آن بهره ببرید.
- مجموعه آموزش رباتیک — کلیک کنید
دستگاه خودکار در مقایسه با ربات
دقیقاً مانند تاریخچه تلفن های همراه، اعلام هر چیزی به عنوان اولین محصول یک فناوری کاملاً به تعریف شما از آن فناوری بستگی دارد. در مورد ربات ها، شاید بتوان گفت اجداد اولیه ربات ها که البته از نظر فنی و ظاهری شبیه ربات نیستند، به عنوان دستگاه های خودکار شناخته می شوند. در ابتدا، تفاوت دستگاه خودکار با ربات این است که یک دستگاه خودکار اقدامات از پیش تعیین شده را بر اساس دستورالعمل های خاص انجام می دهد. این در حالی است که ربات ها می توانند به تنهایی کار کنند و قابل برنامه ریزی هستند که به آنها سطحی از تطبیق پذیری می دهد. دستگاه های اتومات فقط می توانند تعداد محدودی از عملکردها را بر اساس ورودی های بسیار دقیق انجام دهند.
«دعای ساعت» که توسط Juanelo Turriano در دهه 1560 ساخته شد، به عنوان یکی از اولین نمونه های موفقیت دستگاه خودکار در نظر گرفته می شود. این اختراع شگفتانگیز شبیه یک راهب 15 اینچی است که گویی در حال نماز دهان و دستهایش حرکت میکند.

ممکن است شاه فیلیپ دوم اسپانیا انگیزه ایجاد این راهب مکانیکی بوده باشد. داستان از این قرار است که پسرشاه فیلیپ بیمار بود و فیلیپ برای معجزه بهبودی پسرش نذر کرد. در حالی که مشخص نیست این یک داستان واقعی باشد یا نه اما چیزی که می دانیم این است که «دعای ساعت» یک نمونه اولیه چشمگیر از فناوری دستگاه خودکار است. اگرچه ظاهراً این مرد فلزی جذاب قرار بود به وعده معجزه پادشاه اسپانیا فیلیپ دوم عمل کند، اما فقط مجموعه ای از میله و اهرم هایی است که برای شبیه سازی حرکات از پیش تعیین شده ساخته شده است و برای انجام کاری غیر از برخی اقدامات خاص قابل برنامه ریزی نیست که این مورد مانع آن می شود که این مجسمه را نوعی ربات بدانیم.
اولین ربات در چه سالی ساخته شد؟
نمونههای زیادی از دستگاه های خودکار در تاریخ وجود دارد که برخی در اثر گذر زمان جان سالم به در نبردهاند. “Drawing Boy Automata” یک اسباب بازی مکانیکی کوچک ساخته شده از بیش از 6000 قطعه که قادر به نوشتن به صورت مستقل بود. مردی آینده نگر که توانست این ربات را بسازد پیر ژاکه دروز بود. لئوناردو داوینچی طرح هایی برای یک شوالیه مکانیکی کشید که از نظر تئوری می تواند سر خود را حرکت دهد، بازوهایش را روی هم بگذارد و سایر عملکردهای انسانی را انجام دهد.
با این حال، اولین طرح های ثبت شده برای یک دستگاه خودکار به سال 1206 برمی گردد که بیش از دو قرن پیش از داوینچی بود. این ارکستر شناور که توسط دانشمند Al-Jazari طراحی و توسعه یافته بود، یک گروه چهار نفره است. اگرچه این دستگاه هیچ شباهتی به یک ربات مدرن ندارد، اما توانایی آن در برنامه ریزی برای پخش آهنگ های مختلف قابل توجه است.

این گروه نوازنده مکانیکی از دو نوازنده درام، یک نوازنده فلوت و یک نوازنده چنگ تشکیل شده است که بالای یک طبل چرخان با گیره های متصل به اهرم هایی قرار دارد که صداهای موسیقی متفاوتی تولید می کنند. میله ها را می توان تعویض کرد تا گروه بتواند آهنگ دیگری را اجرا کند. برای برخی، این کافی است که این دستگاه را قابل برنامه ریزی و نوعی ربات بنامند.
هرچند، بسیاری از دانش الجزاری در طول سالها از بین رفت و طراحان اولین روباتهای مدرن، هنگام کار بر روی ماشینهای خود، کار او را بررسی نکردند؛ اما چالشی وجود دارد که این دستگاه را می توان یک ربات قابل برنامه ریزی اولیه در نظر گرفت. شما می توانید خودتان قضاوت کنید که آیا این نمایش جالب نبوغ انسانی را می توان اجداد دیرینه ربات های امروزی در نظر گرفت یا خیر.
تاریخچه ربات ها
در ادامه با نام اولین رباتهایی که در سالهای مختلف میلادی ساخته شدند آشنا میشوید.
1954 – Unimate
همانطور که پیش تر گفتیم، مشخص کردن «اولین» هر فناوری به وضوح کار دشواری است و این که اولین ربات در چه سالی ساخته شد قضاوت راحتی نداشته باشد. با این حال، نمی توان انکار کرد که Unimate اولین ربات صنعتی مدرن بود. هدف این دستگاه بلند کردن قطعات داغ فلز از ماشینهای ریختهگری و انتقال آنها به نقطهای دیگر بود. جابجایی اجسام فلزی گرم شده صنعتی برای انسان کار خطرناکی بود و منطقی بود که این عملیات به یک ماشین واگذار شود. اگرچه نسخه بعدی Unimate است که در دهه 1980 به طور گسترده مورد استفاده قرار گرفت، اما طراحی اصلی که در ابتدا در سال 1954 طراحی شده بود، مهم است. این طرح با بازوی همه کاره هنوز هم در کارخانه ها و فضاهای صنعتی در سراسر جهان یافت می شود.
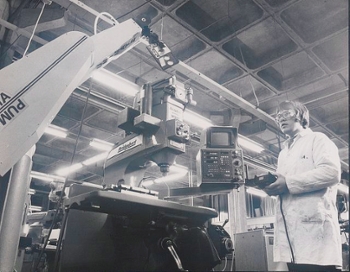
مخترع Unimate جورج دیول «George Devol» است که در سال 1954 طراحی اختراع این ربات را به ثبت رساند و سال 1959 نمونه اولیه آن ساخته شد. Unimate در نهایت در کارخانههای مختلف جنرال موتورز نصب شد، اما دیول نتوانست خود آنها را به فروش خوبی برساند. دیول یک دهه تلاش کرد، اما این تلاش ها و هوش تجاری انگلبرگر «Engleberger» در اواخر دهه 1960 بود که جهان را در مورد Unimate هیجان زده کرد و در نهایت آن را به صنعت آورد. به همین دلیل است که انگلبرگر اغلب به عنوان «پدر علم رباتیک» شناخته می شود.
1966 – Shakey
در حالی که Unimate در آن زمان یک معجزه مکانیکی بود، دانشمندان کامپیوتر میدانستند که رباتیک میتواند فراتر از بازویی باشد که اجسام داغ را از مکانی به مکان دیگر حرکت دهد.
چارلی روزن، «Charlie Rosen» بنیانگذار مرکز هوش مصنوعی بینالمللی SRI، میدانست که پیشرفت بزرگ بعدی در رباتیک، ایجاد ماشینی است که بتواند مشکلات جدید را به تنهایی حل کند؛ بنابراین، Shakey متولد شد.
Shakey با توجه به نامش به دلیل نحوه تکان خوردن در اطراف منطقه آزمایشی، قادر است ورودی های حسی را از محیط خود دریافت کند و بر اساس آن برنامه ریزی کند. در یک فضای آزمایشی متشکل از اتاقهایی با بلوکها و رمپها، Shakey توانست با استفاده از الگوریتمهای تشخیص الگو برای شناسایی گوشهها و طرحهای اشیاء، به طور ایمن پیمایش کند و کارهای پیچیده را در حین انجام کار یاد بگیرد. به عنوان مثال، پس از چندین روز تلاش، ربات متوجه شد که برای قرار دادن یک جعبه روی یک سکو، ابتدا باید یک سطح شیب دار را در موقعیت خود قرار دهد.

در تصویر بالا Shakey در آخرین مکان استراحت خود، موزه تاریخ کامپیوتر، قرار دارد. Shakey در حالی که نسبت به استانداردهای امروزی بزرگ بود، اما دنیای ربات ها را کاملاً متحول کرد. علاوه بر این، ربات قادر به گرفتن جهت های شفاهی بود. Shakey قادر به درک و واکنش به دستورات ساده انگلیسی مانند «go» و «tilt» بود. Shakey هرگز هیچ کاربرد عملی در صنعت پیدا نکرد، اما هدف این دستگاه نیز این نبود. روزن و تیمش پیشرفت های بزرگی در تجزیه و تحلیل بصری، دستکاری اشیا و یافتن مسیر داشتند. بسیاری Shakey را یکی از اولین موفقیت های هوش مصنوعی می دانند. در حالی که ساخت Shakey و Unimate دنیای ربات ها را به طور کامل تغییر داد، اما این فقط شروع راه بود.
- مجموعه آموزش برنامه نویسی در فرادرس — کلیک کنید
1970 – WABOT-1 & WABOT-2
همانطور که فناوری پیشرفته می کند، ما به دنیایی با ربات هایی نزدیک می شویم که از انسان قابل تشخیص نیستند. اینکه آیا واقعاً به آن مرحله خواهیم رسید یا نه مورد بحث است. اگر این کار را انجام دهیم، WABOT-1 را می توان اجداد این ماشین ها و پاسخ به اینکه اولین ربات در چه سالی ساخته شد، در نظر گرفت.
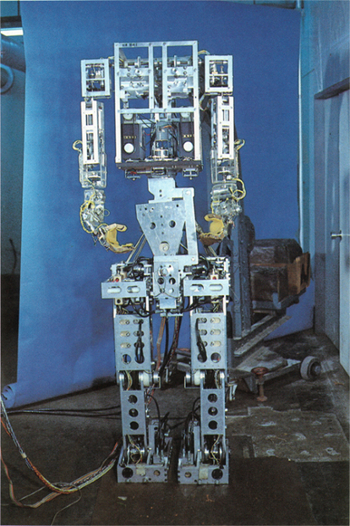
در آغاز سال 1970، محققان دانشگاه Waseda در ژاپن کار بر روی اولین ربات انسان نما را آغاز کردند. WABOT-1 یک جهش بزرگ رو به جلو در زمان خود بود. WABOT-1 آن چیزی نیست که اکثر مردم هنگام تصور یک ربات به آن فکر می کنند، اما این پسر درشت اندام گام های بزرگی در این زمینه برداشت که شایسته تقدیر است. زمانی که این ربات در سال 1973 تکمیل شد، میتوانست دستهای خود را دراز کند و اجسام را بگیرد و همچنین پاهایی داشت که میتوانست به شکلی ابتدایی راه برود. همچنین گوش، چشم و دهان نیمه کاره داشت. این ربات توانست از این ابزارهای حسی برای برقراری ارتباط با یک فرد به زبان ژاپنی و همچنین تخمین فاصله استفاده کند. کارشناسان تخمین زده اند که این دستگاه توانایی ذهنی یک کودک یک و نیم ساله را داشته است و این ربات برای تکمیل عملکردها به زمان زیادی نیاز داشت، مانند 45 ثانیه ای که WABOT-1 برای برداشتن یک قدم نیاز داشت.
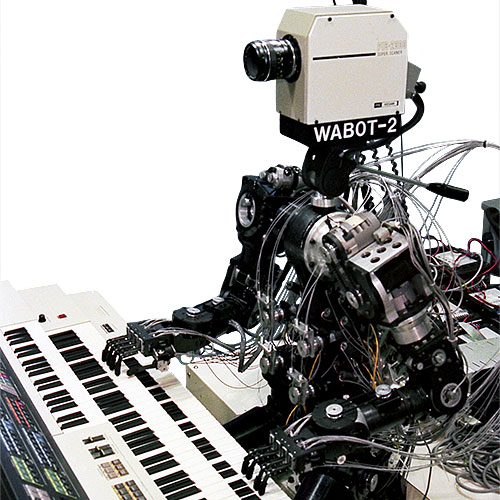
دانشمندان سازنده WABOT-1، می خواستند یک گام فراتر بروند و رباتی بسازند که قادر به انجام کارهای هنری باشد. این کار در سال 1980 با WABOT-2 به اوج خود رسید، یک اعجوبه موسیقی که قادر بود کلیدهای یک ارگ الکتریکی را بنوازد، نت بخواند، با یک نفر صحبت کند و حتی با کسی که در حال آواز خواندن است همراهی کند. این ربات گام بزرگی برای دور شدن از ربات ها به عنوان ابزار همه کاره و رفتن به سمت تحقق یک «ربات شخصی» در نظر گرفته می شود.
1989 – Genghis
چنگیز خان، رهبر امپراتوری مغول و مردی که مسئول مرگ میلیونها نفر بود، در دل کسانی که سر راهش بودند، ترس ایجاد کرد. ربات چنگیز برای اولین بار توسط رادنی بروکس «Rodney Brooks» در سال 1989 نظریهپردازی شد. ربات چنگیز که از حشرات مختلف الهام گرفته شده است، شش پا و ظاهری شبیه حشره دارد. این ماشین یکی از اصیل ترین اهدافی را داشت که یک ربات می توانست به آن دست یابد.

چنگیز شبیه یک مهاجم بیگانه به نظر می رسد. این ماشین به عنوان پیشرو برای انواع رباتهای خودمختار ساخته شد که ممکن است روزی جهان را با خیال راحت و بدون خطری برای جان انسانها کاوش کنند. بروکس معتقد بود که اکتشافات فضایی بسیار قابل دسترس تر و مؤثرتر خواهد بود اگر ما ارتشی از ربات های خودران را برای اکتشاف به جای سپردن کار به انسان ها بفرستیم. بروکس فکر میکرد که کلید این نوع سفر فضایی، رباتهایی هستند که میتوانند بر اساس کنترلکنندههای ساده و توزیعشده درون دستگاه به جای یک سیستم کنترل متمرکز بر موانع غلبه کنند.
برای دستیابی به این هدف، بروکس تمام پردازندههای شناختی را که در اصل در نمونه اولیه چنگیز بود حذف کرد و تنها حسگرهای آن و سختافزار مورد نیاز برای حرکت در اطراف را باقی گذاشت. برخلاف سایر ربات ها، چنگیز واقعاً حرکات خود را برنامه ریزی نمی کند. در عوض، چنگیز، مانند یک حشره، یک اندام را حرکت می دهد و از حسگرهای آن برای تشخیص وجود مانع استفاده می کند. در صورت وجود، دستگاه قادر است حرکت خود را مجدداً محاسبه کند. پاهای چنگیز از مدل سرووهای هواپیما ساخته شده بود. در حالی که رباتهای چنگیز در حال حاضر در منظومه شمسی جستجو نمیکنند، این فناوری گام بزرگی برای رباتیک بود و اکنون نیز در موزه هوا و فضای اسمیتسونیان نگهداری می شود.
1996 – P2
اگرچه ما از اولین و سومین ربات های سری P که در نوع خود دستاوردهای بزرگی بودند چشم پوشی می کنیم، اما ماشین P2 که توسط هوندا ساخته شده است، نمونه ای مثال زدنی از زیبایی ربات ها است که این رد شدن را تضمین می کند.
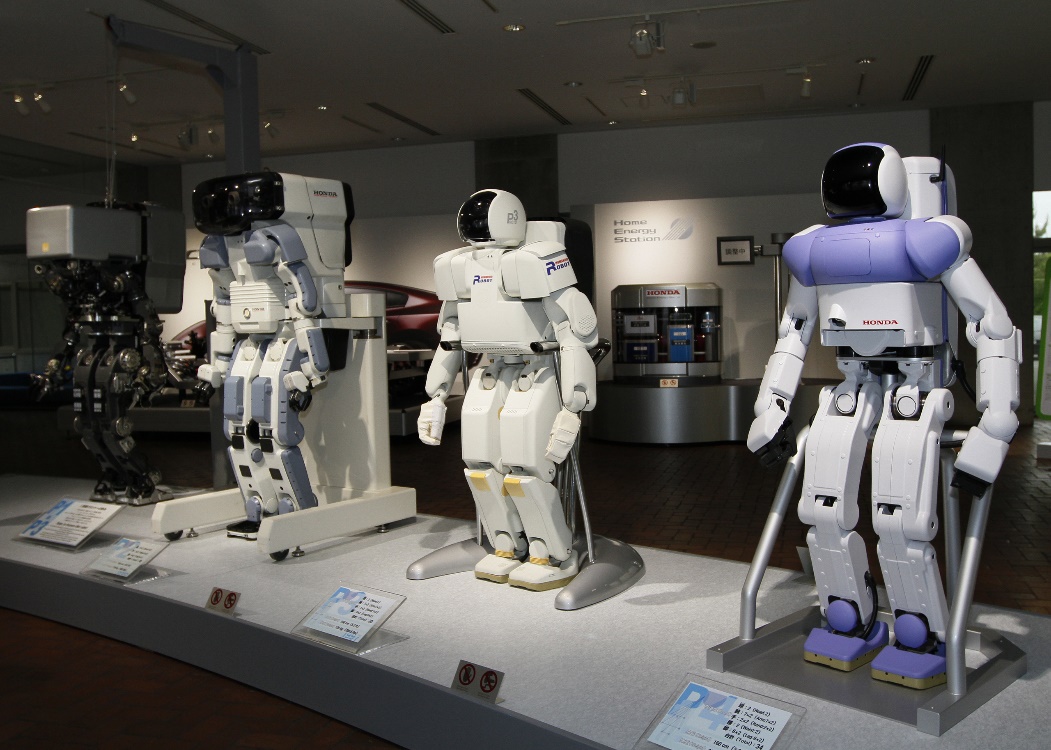
بسیاری P2 را اولین «ربات انسان نمای دو پا» می دانند. P2 با وزن 210 کیلوگرم (462.97 پوند) و ارتفاع 1.82 متر (5.97 فوت) اساساً اندازه انسان بود. یکی از پیشرفت های عمده سیستم P2 بی سیم بودن آن بود که به آن آزادی بیشتری می داد. P2 با باتری کار می کند و دارای یک اتصال رادیویی بی سیم است که به کاربران اجازه می دهد دستورات را صادر کنند. سری P کامل هوندا در شکل زیر نشان داده شده است.
این ربات میتواند به طبقه بالا برود، یک گاری را هل دهد و با سهولت نسبی به عملکردهای مشابه انسان دست یابد. این ربات همچنین می تواند با سرعت 2 کیلومتر در ساعت (1.24 مایل در ساعت) حرکت کند. هرچند این سرعت تقریباً نصف سرعت یک انسان معمولی است، مهم است که به یاد داشته باشید که این فناوری انقلاب عظیمی در حوزه یاخت ربات بود. به یاد دارید چقدر طول کشید تا WABOT-1 حرکت کند؟
کلام آخر
در این مقاله سعی کردیم به این سال پاسخ دهیم که اولین ربات در چه سالی ساخته شد اما همانطور که مشاهده کردید تعیین آن کار آسانی نیست و به تعریف شما از ربات بستگی دارد. امروزه برنامه نویسی یک مهارت کلیدی برای کار در رباتیک است. رباتیک بر استفاده از هوش مصنوعی قابل برنامهریزی در دو یا چند محور با درجه ای از خودمختاری متمرکز است. اگر میخواهید درباره برنامهنویسی برای رباتیک بیشتر بدانید، دوره آنلاین آموزش برنامه نویسی ربات فرادرس به شما کمک خواهد کرد که در این زمینه حرفه ای شوید.
- آموزش برنامه نویسی ربات LEGO EV3 با لب ویو LabVIEW — کلیک کنید